

349
y
4
=y
3
+∆y
3
=1,85895+0,4219=2,28085;
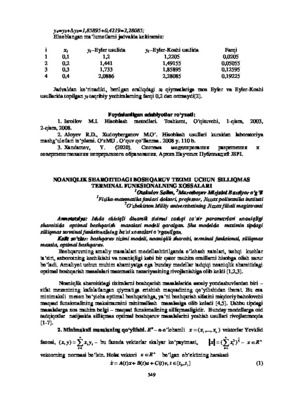
Hisoblangan ma‘lumotlarni jadvalda keltiramiz:
i
x
i
y
i
–
Eyler usulida
y
i
–
Eyler-Koshi usulida
Farqi
1
0,1
1,2
1,2205
0,0205
2
0,2
1,441
1,49155
0,05055
3
0,3
1,733
1,85895
0,12595
4
0,4
2,0886
2,28085
0,19225
Jadvaldan ko‘rinadiki, berilgan oraliqdagi
x
i
qiymatlariga mos Eyler va Eyler-Koshi
usullarida topilgan
y
i
taqribiy yechimlarning farqi 0,2 dan ortmaydi[2].
Foydalanilgan adabiyotlar roʻyxati:
1.
Isroilov
M.I.
Hisoblash
metodlari.
Toshkent,
Oʻqituvchi,
1-qism,
2003,
2-qism, 2008.
2.
Aloyev R.D., Xudoyberganov M.Oʻ. Hisoblash usullari kursidan laboratoriya
mashg‘ulotlari toʻplami. OʻzMU . Oʻquv qoʻllanma . 2008 y. 110 b.
3.
Xandamov,
Y.
(2020).
Система
моделирования
разрешения
и
совершенствования непрерывного образования. Архив Научных Публикаций JSPI.
NOANIQLIK SHAROITIDAGI BOSHQARUV TIZIMI UCHUN SILLIQMAS
TERMINAL FUNKSIONALNING XOSSALARI
1
Otakulov Salim,
2
Murotboyev Mirjalol Baxtiyor o‗g‗li
1
Fizika-matematika fanlari doktori, professor, Jizzax politexnika instituti
2
O‗zbekiston Milliy universitetining Jizzax filiali magistranti
Annotatsiya:
Ishda chiziqli dinamik tizimni tashqi ta‘sir parametrlari noaniqligi
sharoitida optimal boshqarish masalasi modeli qaralgan. Shu modelda maximin tipdagi
silliqmas terminal funksionalning ba‘zi xossalari o‗rganilgan.
Kalit so‗zlar:
boshqaruv tizimi modeli, noaniqlik sharoiti, terminal funksional, silliqmas
masala, optimal boshqaruv.
Boshqaruvning amaliy masalalari modellashtirilganda o‗lchash xatolari, tashqi kuchlar
ta‘siri, axborotning kechikishi va noaniqligi kabi bir qator muhim omillarni hisobga olish zarur
bo‗ladi. Amaliyot uchun muhim ahamiyatga ega bunday modellar tadqiqi noaniqlik sharoitidagi
optimal boshqarish masalalari matematik nazariyasining rivojlanishiga olib keldi [1,2,3].
Noaniqlik sharoitidagi tizimlarni boshqarish masalalarida asosiy yondashuvlardan biri –
sifat mezonining kafolatlangan qiymatiga erishish maqsadining qo‗yilishidan iborat. Bu esa
minimaksli meson bo‗yicha optimal boshqarishga, ya‘ni boshqarish sifatini miqdoriy baholovchi
maqsad funsionalining maksimumini minimallash masalasiga olib keladi [4,5]. Ushbu tipdagi
masalalarga xos muhim belgi – maqsad funsionalining silliqmasligidir. Bunday modellarga oid
tadqiqotlar natijasida silliqmas optimal boshqaruv masalalarini yeshish usullari rivojlanmoqda
[1-7].
2. Minimaksli masalaning qo‗yilishi.
R
n
– n
-o‗lchamli
)
,...,
(
1
n
x
x
x
vektorlar Yevklid
fazosi,
n
i
i
i
y
x
y
x
1
)
,
(
– bu fazoda vektorlar skalyar ko‗paytmasi,
2
1
)
(
1
2
n
i
i
x
x
–
n
R
x
vektorning normasi bo‗lsin. Holat vektori
n
R
х
bo‗lgan ob‘ektining harakati
]
,
[
,
)
(
)
(
)
(
1
0
t
t
t
v
t
C
u
t
B
x
t
A
x
(1)

350
ko‗rinishdagi vektorli differensial tenglama bilan berilgan deb hisoblaymiz, bu yerda
n
n
t
А
)
(
matritsa,
m
n
t
B
)
(
matritsa,
k
n
t
C
)
(
matritsa,
m
R
u
– boshqaruv
vektori,
k
R
v
noaniq tashqi ta‘sirlar parametri. Tashqi ta‘sirlar parametri haqida axborot
minimal, ya‘ni faqat
W
v
,
W
– berilgan qavariq va kompakt to‗plam ekanligi ma‘lum.
Shuning uchun mumkin bo‗lgan tashqi ta‘sirlar
W
to‗plamdan qiymatlar qabul qiluvchi barcha
)
(
t
v
v
,
]
,
[
1
0
t
t
T
t
o‗lchovli va chegaralangan funksiyalarning
)
(
T
W
to‗plamini tashkil
etadi deb hisoblaymiz.
)
(
T
U
joyiz boshqaruvlar
to‗plami qavariq va kompakt
U
to‗plamdan qiymatlar qabul
qiluvchi
)
(
t
u
u
,
T
t
o‗lchovli funksiyalardan iborat bo‗lsin. Agar
)
(
t
A
,
)
(
t
B
va
)
(
t
C
matritsalar elementlari
]
,
[
1
0
t
t
T
oraliqda o‗lchovli (masalan, uzluksiz yoki bo‗lakli uzluksiz
) bo‗lsa, u holda differensial tenglamalar nazariyasiga ko‗ra, har bir
)
(
T
U
u
,
)
(
T
W
v
va
0
0
)
(
x
t
x
boshlang‗ich shartga mos ravishda (1) boshqaruv tizimining yagona
)
,
,
,
(
)
(
0
v
u
x
t
x
t
x
absolyut uzluksiz yechimi – traektoriyasi mavjud bo‗ladi.
Qaralayotgan
(1)
tizimda
boshqaruv
sifatini
miqdoriy
baholash
uchun
)
,
,
,
(
)
(
0
v
u
x
t
x
t
x
traektoriyalarda aniqlangan.
))
,
,
,
(
,
(
min
))
,
,
,
(
(
0
1
,
1
0
1
v
u
x
t
x
l
v
u
x
t
x
g
i
v
i
(2)
ko‗rinishdagi terminal funksionalni qaraymiz , bu yerda
n
i
R
l
,
v
i
,
1
- berilgan vektorlar.
(1) tizim uchun
0
x
boshlang‗ich nuqta ham noaniq, ya‘ni faqat
D
x
0
shart ma‘lum
bo‗lsin, bunda
n
R
D
biror kompakt to‗plam. Shuning uchun (1) tizimda boshqaruvni
(2) terminal funksional asosida baholashda
boshqaruv mezoni
sifatida
))
,
,
,
(
(
max
max
)
(
0
1
)
(
0
v
u
x
t
x
g
u
J
T
W
v
D
x
(3)
maqsad funksionaliga kelamiz. (2) funksional ko‗rinishini hisoga olsak, (3) – maximin tipdagi
funksionaldan iborat. Quyidagi optimal boshqaruv masalasini qaraymiz:
shunday
)
(
*
T
U
u
joyiz boshqaruvni topish talab etiladikii, bu boshqaruvda (3) funksional o‗zining minimal
qiymatiga erishsin:
)
(
min
)
(
)
(
*
u
J
u
J
T
U
u
. Bu minimallashtitish masalasida (3) funksional
maksimum va mnimum amallari orqali aniqlanmoqda. Shuning uchun uni silliqmas
optimal
boshqaruv
masalalari sinfiga oid deb hisoblash mumkin.
3. Erishsh to‗plami uchun Koshi formulasi.
)
,
(
t
F
n
n
matritsa (1) chiziqli
tizimga mos bir jinsli tizim fundamental yechimlar matritsasi bo‗lsin.
)
,
(
t
F
matritsa har bir
argumenti bo‗yicha uzluksiz differensiallanuvchi va u
),
,
(
)
(
)
,
(
t
F
t
A
t
t
F
,
,
T
t
E
F
)
,
(
tengliklarni qanoatlantiradi. Ma‘lumki [1]
)
,
(
t
F
fundamental matritsa yordamida (1)
tizimning
)
,
,
,
(
0
v
u
x
t
x
trayektoriyasi
t
t
t
t
d
v
C
t
F
d
u
B
t
F
x
t
t
F
v
u
x
t
x
0
0
)
(
)
(
)
,
(
)
(
)
(
)
,
(
)
,
(
)
,
,
,
(
0
0
0
(5)
Koshi formulasi
bilan tasvirlanadi.
Endi (1) tizimning barcha
)
(
T
W
v
parametrga mos keluvchi trayektoriyalarining
1
t
t
momentdagi
)
,
,
,
(
0
1
v
u
x
t
x
uchlaridan tuzilgan to‗plamni qaraymiz:
)
(
),
,
,
,
(
:
)
,
,
(
0
1
0
1
T
W
v
v
u
x
t
x
R
u
x
t
X
n
. Noaniqlik sharoitidagi (1) tizimning har joiz
boshqaruvga mos ravishda barcha mumkin bo‗lgan tashqi ta‘sirirlar bo‗yicha trayektoriyalari
tomonidan erishishilaigan terminal holatlar to‗plami deb tushuniladigan
)
,
,
(
0
1
u
x
t
X
to‗plamni
(5) Koshi formulasidan foydalanib tasvirlash mumkin. Haqiqatan ham, agar quyidagi
W
v
v
C
t
F
W
C
t
F
t
Ф
,
)
(
)
,
(
:
)
(
)
,
(
)
,
(

351
akslantirishni qarasak, bu akslantirish har bir
T
T
t
)
,
(
nuqtaga
n
R
fazoning qavariq
va kompakt
)
,
(
t
Ф
to‗plamini mos qo‗yadi. Ko‗p qiymatli akslantirishlar nazariyasiga ko‗ra
)
,
(
t
Ф
akslantirish har bir argument bo‗yicha uzluksizdir. Endi (5) Koshi formulasidan va
W
t
C
t
t
F
t
t
Ф
)
(
)
,
(
)
,
(
1
1
ko‗p qiymatli akslantirish integrali tushunchasidan foydalansak,
)
,
,
(
0
1
u
x
t
X
erishish to‗plami uchun quyidagi Koshi formulasi o‗rinli bo‗ladi:
1
0
1
0
)
(
)
,
(
)
(
)
(
)
,
(
)
,
(
=
)
,
,
(
1
1
0
0
1
0
1
t
t
t
t
Wdt
t
C
t
t
F
dt
t
u
t
B
t
t
F
x
t
t
F
u
x
t
X
.
(6)
4. Maqsad funksionalining xossalari.
Qo‗yilgan masalani yechishda katta
ahamiyatga ega bo‗lgan (2) va (3) funksionallarning xossalarini keltiramiz. Chiziqli
funksiyalarning xossalariga ko‗ra
)
,
(
min
)
,
(
min
,
1
x
l
x
l
coL
l
i
v
i
(7)
tenglik bajariladi. Endi
)
,
(
min
)
(
,
1
x
l
x
g
i
v
i
funksiya botiqligini va (7) tenglikni hisobga
olib,
)
,
(
min
max
)
(
max
,
1
)
,
,
(
)
,
,
(
0
1
0
1
i
v
i
u
x
t
X
u
x
t
X
l
g
tenglikda minimaks haqidagi teoremani [1,8]
qo‗llaymiz. Natijada quyidagiga ega bo‗lamiz:
)
,
(
max
min
)
,
(
min
max
)
(
max
)
,
,
(
)
,
,
(
)
,
,
(
0
1
0
1
0
1
l
l
g
u
x
t
X
coL
l
coL
l
u
x
t
X
u
x
t
X
. (8)
)
,
,
(
0
1
u
x
t
X
to‗plam uchun (6) formuladan foydalanamiz. U vaqtda
1
0
1
0
0
1
)
,
)
(
)
,
(
(
max
)
),
(
)
(
)
,
(
(
)
,
)
,
(
(
)
,
(
max
1
1
0
0
1
)
,
,
(
t
t
t
t
W
v
u
x
t
X
dt
l
v
t
C
t
t
F
dt
l
t
u
t
B
t
t
F
l
x
t
t
F
l
.
(9)
Endi (8) va (8) tengliklar asosuda quyidagi tasdiq kelib chiqadi.
Teorema 1
. Ixtiyoriy
D
x
0
va
)
(
T
U
u
uchun ushbu
1
0
1
0
0
1
]
)
,
)
(
)
,
(
(
max
)
),
(
)
(
)
,
(
(
)
,
)
,
(
[(
min
)
(
max
1
1
0
0
1
)
,
,
(
t
t
t
t
W
v
L
l
u
x
t
X
dt
l
v
t
C
t
t
F
dt
l
t
u
t
B
t
t
F
l
x
t
t
F
g
, (10)
tenglik bajariladi, bu yerda
,
,
1
:
v
i
l
L
i
coL
L
to‗plamning qavariq qobig‗idir.
)
,
,
(
0
1
u
x
t
X
to‗plamning aniqlanishini hisobga olsak, (2) funksional uchun
)
(
max
))
,
,
,
(
(
max
)
,
,
(
0
1
)
(
0
1
g
v
u
x
t
x
g
u
x
t
X
T
W
v
bajarilishini ko‗ramiz. Natijada, quyidagini olamiz.
Teorema 2
. Ixtiyoriy
)
(
T
U
u
uchun (3) funksional qiymatlari
1
0
1
0
)
,
)
(
)
,
(
(
max
)
),
(
)
(
)
,
(
(
)
,
)
,
(
(
max
min
)
(
1
1
0
1
t
t
t
t
W
v
D
coL
l
dt
l
v
t
C
t
t
F
dt
l
t
u
t
B
t
t
F
l
t
t
F
u
J
(11)
formula bilan hisoblanadi.
Teorema 3.
(11) formula bilan aniqlanuvchi
)
(
u
J
funksional
)
(
T
U
da botiq
funksional bo‗ladi.
Haqiqatan ham, ixtiyoriy
)
(
T
U
u
va
n
R
l
nuqtalarda aniqlangan.
1
0
1
0
)
,
)
(
)
,
(
(
max
)
),
(
)
(
)
,
(
(
)
,
)
,
(
(
max
)
,
(
1
1
0
1
t
t
t
t
W
v
D
dt
l
v
t
C
t
t
F
dt
l
t
u
t
B
t
t
F
l
t
t
F
l
u
funksionalini qaraymiz. Bu funksional har bir belgilangan
n
R
l
uchun
)
(
T
U
u
bo‗yicha
chiziqli (demak botiq) funksionaldir. Bundan
)
,
(
min
)
(
l
u
u
J
L
l
funksionalning
)
(
T
U
da
botiq bo‗lishi kelib chiqadi.

352
5. Xulosa.
Ishda noanqlik sharoitidagi chiziqli tizim uchun maximin tipdagi terminal
funksionalni optimallashtirish masalasi qaraldi. (6) Koshi formulasi asosida har bir
)
(
,
0
T
U
u
R
x
n
uchun
)
,
,
(
0
1
u
x
t
X
erishish to‗plami –
n
R
fazoning qavariq va kompakt
to‗plamidan iboratligi aniqlandi. Shundan foydalanib, masaladagi silliqmas funsional xossalari
o‗rganildi. Bunda yordamchi (7) va minimaksli tipdagi
)
(
u
J
funksional uchun (11) formulalar
olindi. Bu tasvirlar yordamida
)
(
u
J
funksionalning botiqligi ko‗rsatildi. Olingan (11) formula
asosida
)
(
u
J
funksionalning usluksisligini ko‗rsatish va uning yo‗nalishlar bo‗yicha
differensiallanuvchanlik shartlarini ham o‗rganish mumkin bo‗ladi.
Foydalanilgan adabiyotlar roʻyxati:
1. Куржанский А.Б. Управление и наблюдение в условях неопределенности .-М.:
Наука, 1977.
2.
Черноусько Ф.Л., Меликян А.А. Игровые задачи управления и поиска .-
М.:Наука,1978.
3.
Кларк Ф. Оптимизация и негладгий анализ.-М.:Наука, 1988.
4.
Кейн В.М. Оптимизация систем управления по минимаксному критерию. -
М.:Наука, 1988.
5.
Otakulov S., Rahimov B. Sh., Haydarov T.T. The nonsmoth optimal control problem
for ensamble of trajectories of dynamic system under conditions of indeterminacy. Middle
European Scientific Bulletin, vol. 5, October 2020 . pp. 38-42.
6.
Демьянов
В.Ф.,
Рубинов
А.М.
Основы
негладкого
анализа
и
квазидифференциальное исчисление. – М.: Наука, 1990.
7.
Otakulov S., Haydarov T.T.,
Sobirova G. D
.
The minimax optimal control problem for
dynamic system with parameter and under conditions of indeterminacy. International Conference
on Digital Society, Innovations &Integrations of Life in New Centuru, Januar 2021.
International Enjineering Journal for Research & Development(IEJRD), ICDSIIL-21 Issue. pp.
279-282. DOI: 10.17605/OSF.10/HCNB3
8.
Пшеничний Б.Н. Выпуклый анализ и экстремальные задачи -М.:Наука,1980.
MATEMATIKA FANLARINI O‗QITISHDA INNOVATSION VA AXBOROT
TEXNOLOGIYALARIDAN FOYDALANISH
Sharipova Sadoqat Fazlitdinovna
O‗zbekiston Milliy universitetining Jizzax filiali
―Amaliy matematika‖ kafedrasi katta oʻqituvchisi
Annotasiya:
Matematika oʻqitish vositalari orasida axborot texnologiyalari azaldan
muhim oʻrinni egallab kelmoqda. Multimediali taqdimotlar, test snaryadlari, elektron darsliklar,
funksiya grafiklari yoki geometrik jismlarni chizish uchun maxsus dasturlardan foydalanish
matematika o‗qitish jarayonining ajralmas qismiga aylandi. Axborot texnologiyalarining doimiy
rivojlanishi ushbu maqolada muhokama qilingan o'quv jarayonida ulardan foydalanishning
boshqa variantlarini taklif qiladi. Interfaol mashqlar, mobil qurilmalar, interaktiv onlayn
doskalar, aqliy xaritalar yaratish xizmatlari, mikrobloglar, toʻldirilgan reallikka asoslangan
ilovalardan foydalanish matematika oʻqitish jarayoniga innovatsion yondashuvlarni amalga
oshirish imkonini beradi. Ushbu maqolada ushbu imkoniyatlarni amalga oshirish imkonini
beruvchi ilovalar tahlili berilgan, ularni o‗quv jarayonida qo‗llash yo‗nalishlari ko‗rib chiqilib,
matematika o‗qitish jarayonida bilim faolligi va qiziqishini oshirish maqsadida ulardan
foydalanish bo‗yicha uslubiy ko‗rsatmalar berilgan.





